 Prof. Mario Malcangi
malcangi@di.unimi.it
Prof. Mario Malcangi
malcangi@di.unimi.it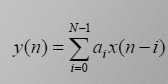

Analisi Matematica / Matematica discreta / Fisica
Materiale didattico Top
Testo di riferimento (dispensa):
M. Malcangi: "Elaborazione numerica del segnale", Maggioli Editore, Milano, 2013. (Disponibile presso Libreria Cortina).
Steven W Smith – The scientist and Engineer’s guide to Digital Signal Processing – California Technical Publiscing, 1999
Esempi di programmazione di algoritmi DSP (script Matlab):
Generazione
di segnali con tecnica table look-up
%
set-up
parametri
Fs=8000; %
Frequenza di campionamento [Hz]
Ts=1/Fs; %
Periodo
di campionamento [s]
Fo=1; %
Frequenza fondamentale [Hz]
To=1/Fo; %
Periodo
fondamentale [s]
Ns=Fs/Fo; %
Dimensione tabella (1 secondo)
alfa=0:2*pi/Ns:2*pi-2*pi/Ns;
s=sin(alfa);
%
----------------------------Frequenza--------------------------
F=2;
%
FREQUENZA DA GENERARE [Hz]
if (F
> Fs/2)
F=Fs/2; %
satura se supera la metà della frequenza di campionamento
end
%
converte
la frequenza in passo di lettura nella tabella
N=Fs/F;
Step=Ns/N;
%
---------------------------Ampiezza------------------------------
AdB=-24; %
AMPIEZZA
DA GENERARE [dB]
%
converte
dB in lineare
A=1;
while (AdB <= 0)
AdB=AdB+6;
A=A/2;
end
%
-----------------------------Fase--------------------------------
Fase=pi/2;
%
fase
iniziale [radianti]
%
converte
la fase iniziale in numero di campione
Fi=Ns/(2*pi/Fase);
% -----------------------------Generatore Table
Look-Up---------
m=Fi;
for
n=1:Ns
mm=fix(m); %
trasforma in intero
if(mm
== 0) mm=1; %
corregge
se indice == 0
end
x(n)=A*s(m); %
estra dalla tabella e applica il
fattore di ampiezza
m=m+Step;
while (mm > Ns) % wrap around
- buffering circolare
m=m-Ns;
end
end
%
----------------------------Visualizza---------------------------
figure;
plot(x);
sound(x,Fs);
Identificazione
frequenze singole tramite calcolo DFT semplificato
%formato
digitalizzazione
segnale
Fs=8000; %
frequenza di campionamento [Hz]
NBITS=16; %
numero
di bit di quantizzazione
%
parametri funzionali
w=20; %
Dimensione finestra di analisi
[msec]
f0=1000/w; %
La scansione frequenziale sarà f0,
2f0, 3f0, ...
T=0.2; %
Soglia
di riconoscimento del tono
Nw=Fs*w/1000; %
Dimensione della finestra di analisi espressa in numero di campioni
%
Frequenza da identificare
F=697;
%
Tabella
base per il cacolo seno/coseno in modalità table look-up
%
(digitalizzazione di un periodo (2*pi) pari alla dimensione della
finestra)
for n=1:Nw
s(n)=sin(2*pi*f0/Fs*(n-1));
end
%
------------------------------------------------------------------
%
acquisizione del segnale: segliere una delle due modalità seguenti
%
(eliminando quella che non viene
utilizzata):
%
------------------------------------------------------------------
%
modalità
1: cattura del segnale da convertitore A/D (scheda audio)
%r = audiorecorder(Fs, NBITS,
1);
%record(r); %
speak into microphone...
%stop(r);
%x
=
getaudiodata(r, 'double'); % get data
%
------------------------------------------------------------------
%
modalità
2: cattura del segnale da file (formato .wav)
[x,Fs,NBITS]=wavread('dtmf.wav');
%
------------------------------------------------------------------
%
visualizza il segnale acquisito
figure;
plot(x);
%
conversione in step della frequenza per il table look-up
N=Fs/F;
Step=Nw/N;
%
ricerca
della frequenza
k=0;
cont=100;
while
cont > 0
cont=cont-1;
%
estrazione di una finestra da analizzare
for i=1:Nw
xw(i)=x(i+k);
end
k=k+Nw;
clf;
plot(xw); %
Visualizza la finestra di
segnale
Afc=Afc+xw(n)*s(l);
%
estrae
la componente reale (coseno)
% incrementa lo step
m=m+Step;
l=l+Step;
while (m
> Nw) %
e
gestisce il wrap-around del buffer circolare
m=m-Nw;
end
while (l > Nw) % e gestisce il wrap-around
l=l-Nw;
end
end
Af=sqrt(Afs*Afs+Afc*Afc); %
calcola il modulo
Af=2*Af/Nw %
scala il valore ottenuto per la
dimensione della finestra e moltiplica per 2
if
(Af > T) break; %
se l'ampiezza
misurata è superiore alla soglia, termina
end
end
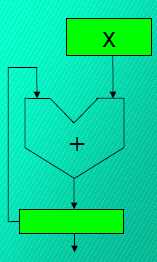
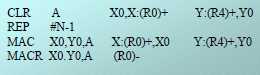
Implementazione
della decodifica della tastiera DTMF
%Formato
digitalizzazione segnale
Fs=8000; %
Frequenza di campionamento [Hz]
NBITS=16; %
Numero
di bit di quantizzazione
%
Parametri
funzionali
w=20; %
Dimensione finestra di analisi
[msec]
f0=1000/w; %
La scansione frequenziale sarà
f0, 2f0, 3f0, ...
T=0.15; %
Soglia
di riconoscimento del tono
Nw=Fs*w/1000; %
Dimensione
della finestra di analisi espressa in numero di campioni
%
Tabella
base per il cacolo seno/coseno in modalità table look-up
%
(un
periodo di durata pari alla dimensione della finestra di analisi(2pi))
for n=1:Nw
s(n)=sin(2*pi*f0/Fs*(n-1));
end
%
digitalizza il segnale DTMF
%r
=
audiorecorder(Fs, NBITS, 1);
%record(r); %
speak into microphone...
%stop(r);
%x = getaudiodata(r, 'double'); % get data
[x,Fs,NBITS]=wavread('dtmf.wav');
figure;
plot(x);
%
frequenza
di riga della tastiera DTMF
F=697;
Row=1;
%
conversione in step della frequenza per il table look-up
N=Fs/F;
Step=Nw/N;
%
ricerca
della frequenza
k=0; %indice
di frame
sizex=size(x); %dimensione
dello stream di
segnale
cont=sizex(1)/Nw; %numero
di finestre
while
cont > 0
cont=cont-1;
%
estrazione di una finestra di 20
ms da analizzare
for i=1:Nw
xw(i)=x(i+k);
end
k=k+Nw;
clf;
plot(xw); %
visualizza la finestra di
segnale
%
analizza la finestra di segnale
Afs=0;
Afc=0;
m=1; %
fase zero (seno)
l=m+(Nw/4);
%
fase
pi/2 (coseno)
for
n=1:Nw
%
converte l'indice da reale a intero
mm=fix(m);
if(mm
== 0) mm=1; %
e lo corregge
se necessario
end
ll=fix(l);
if(ll
== 0) ll=1; %
e lo
corregge se necessario
end
%
applica le funzioni ortogonali
seno e coseno
Afs=Afs+xw(n)*s(mm);
%
estrae
la componente immaginaria (seno)
Afc=Afc+xw(n)*s(ll);
%
estrae
la componente reale (coseno)
% incrementa lo step
m=m+Step;
l=l+Step;
while (m
> Nw) %
e
gestisce il wrap-around del buffer circolare
m=m-Nw;
end
while (l > Nw) % e gestisce il
wrap-around
l=l-Nw;
end
end
Af=sqrt(Afs*Afs+Afc*Afc); %
calcola il modulo
Af=2*Af/Nw; %
scala il valore ottenuto per la dimensione
della finestra e moltiplica per 2
if
(Af > T) %
controlla se esiste la frequenza di colonna
%
Frequenza di colonna della
tastiera DTMF
F=1633;
Column=4;
%
conversione
in step della frequenza per il table look-up
N=Fs/F;
Step=Nw/N;
%
ricerca
della frequenza
%
analizza la finestra di segnale
Afs=0;
Afc=0;
m=1;
%
fase zero (seno)
l=m+Nw/4;
%
fase
pi/2 (coseno)
for
n=1:Nw
mm=fix(m);
if(mm
== 0) mm=1; %
e lo
corregge se necessario
end
ll=fix(l);
if(ll
== 0) ll=1; %
e lo
corregge se necessario
end
%
applica la funzione ortogonale
seno
Afs=Afs+xw(n)*s(mm); %
estrae
la componente immaginaria (seno)
Afc=Afc+xw(n)*s(ll); %
estrae
la componente reale (coseno)
% incrementa lo step
m=m+Step;
l=l+Step;
while (m
> Nw) %
e
gestisce il wrap-around del buffer circolare
m=m-Nw;
end
while (l > Nw) % e gestisce il
wrap-around
l=l-Nw;
end
end
Af=sqrt(Afs*Afs+Afc*Afc);
%
calcola
il modulo
Af=2*Af/Nw;
%
scala il valore ottenuto per la
dimensione della finestra e moltiplica per 2
if
(Af > T)
Row=Row %
FREQUENZA DI RIGA E DI COLONNA SONO STATE IDENTIFICATE: TERMINA
Column=Column
break;
end
end
end
Implementazione
di un filtro passa banda combinado un passa basso
con
un passa alto reiterato più volte
FS=8000;
%Campionamento
NBITS=16; %Quantizzazione
f=50; %Frequenza base
del pattern-test
k=1; %Indice di
frequenza
for n=1:D
x(k)=sin(2*pi*n*f/FS);
k=k+1;
end
f=f*2; %
progressione d’ottava
end
while(1)
% loop
infinito per valutare quante iterazioni sono necessarie per ottenere la
risposta in frequenza desiderata
%
In ambiente MATLAB mettersi in modalità debug, posizionare
un breakpoint su questa istruzione ed eseguire un RUN
%
Ogni ciclo while viene eseguita una
iterazione
PassaBasso+PassaAlto e visualizzata la risposta in frequenza.
%
Per interrompere il ciclo while infinito, dare il comando CTRL+C al
prompt
della command window di MATLAB
N=size(x);
%Durata in campioni del patter test utilizzato per valutare la risposta
in frequenza
n=2;
y(n-1)=0;
Fc=400; %Frequenza di taglio filtro
passa basso
a=1-exp(-2*pi*(Fc/FS));
b=1-a;
%Filtro passa basso
while n < N(2)
y(n)=a*x(n)+b*y(n-1);
n=n+1;
end
x=y*1.707; % L’uscita del filtro passa basso
(normalizzata) viene connessa all’ingresso del filtro passa alto che
segue
n=2;
y(n-1)=0;
Fc=400; %Frequenza di taglio filtro
passa alto
a=1-exp(-2*pi*(Fc/FS));
b=1-a;
%Filtro passa alto
R=0;
while n < N(2)
y(n)=x(n)-
R;
R=x(n)*a+R*b;
n=n+1;
end
plot(y);
%
Visualizza la risposta in frequenza
x=y; % connette l’uscita del passa alto
nell’ingresso
del successivo passa basso
end % esegue una nuova iterazione
Implementazione
di un filtro passa basso FIR derivandolo da un filtro IIR
FS=8000;
NBITS=16;
Fc=400; %Frequenza di taglio del
filtro IIR da
implementare come FIR
a=1-exp(-(2*pi*Fc/FS));
b=1-a;
h(1)=a;
n=2;
while 1
h(n)=b*h(n-1);
if
h(n)<0.000001 break
end
n=n+1;
end
plot(h);
%H=fft(h,512);
%RH=real(H);
%IH=imag(H);
%PWR=sqrt(RH.^2+IH.^2)/512;
%f = FS*(0:256)/512;
%plot(f,PWR(1:257))
%title('Frequency content of
h')
%xlabel('frequency (Hz)')
TAPS=n; % Durata della
risposta all’impulso
D=0.1*FS;
f=50;
for n=1:TAPS
x(n)=0;
end
k=n;
while f<FS/2
for n=1:D
x(k)=sin(2*pi*n*f/FS);
k=k+1;
end
plot(x);
f=f*2;
end
Modalità di esame: Scritto; Modalità di frequenza: Fortemente consigliata; Modalità di erogazione: Tradizionale.
Contatti
Top
Prof. Mario Malcangi
Computer Science Department
Università degli Studi di Milano
Mail: Via Celoria 18
20133 Milano
Italy
Office: Via Celoria 18
Dipartimento di informatica
4° Piano - stanza 4005
20133 Milano
Italy
Tel: +39.02.503.14014
Email:
malcangi@di.unimi.it
Skype: mario.malcangi
Last update: November 19th, 2018
© 2018 Mario
Malcangi
Università degli Studi di
Milano
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}